Joints
Joints are the elements that connect two links in a robot. They define the relative motion between the links.
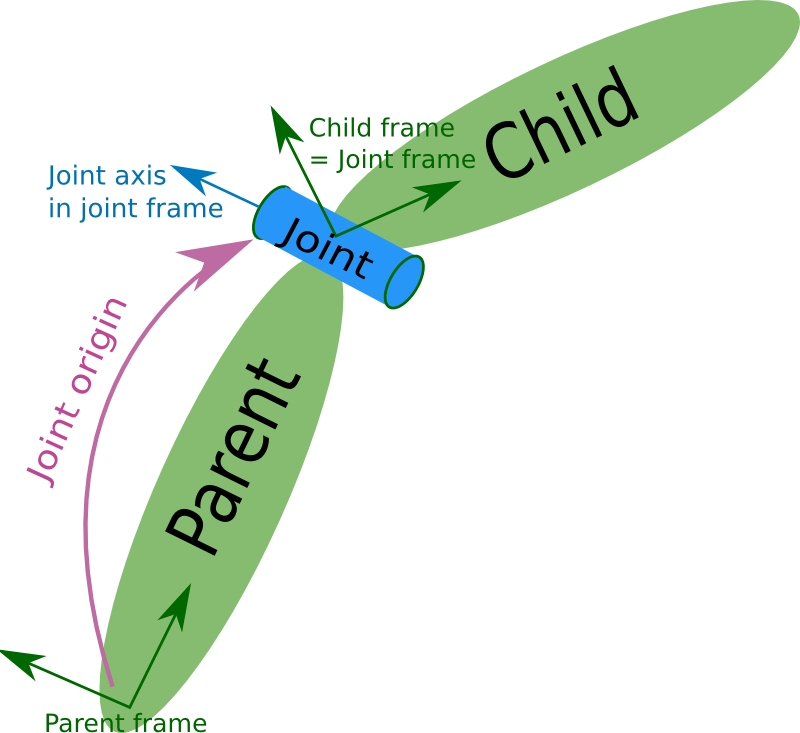
The joint element in the URDF defines the kinematics and dynamics of the joint and also specifies the safety limits of the joint.
Types of Joints
There are several types of joints including:
Fixed
A fixed joint is a joint that does not move. It is used to connect two links that are rigidly attached to each other.
Revolute
A revolute joint is a joint that allows rotation around a single axis. It is similar to a hinge joint.
Prismatic
A prismatic joint is a joint that allows translation along a single axis.
Continuous
A continuous joint is a joint that can rotate indefinitely.
Planar
A planar joint is a joint that allows motion in a plane.
Floating
A floating joint is a joint that allows motion in 6 degrees of freedom.
Listed below are optional attributes that can be added to the joint element: